电机常识
阅读数:367 评论数:0
跳转到新版页面分类
机电
正文
一、异步电机
异步电机是一种常见的交流电动机类型,也被称为感应电动机。
异步电机的工作原理是基于电磁感应。当电机的定子上通以交流电时,会在转子中感应出电流,从而产生旋转力距。这种感应电动机的名称源于定子电流和转子电流之间的异步性,即转子速度不等于同步速度。
1、定子磁场的旋转速度
由电机的电源频率决定,称为同步速度($ n_s $),计算公式为:
$
n_s = \frac{120 \times f}{p}
$
其中 $ f $ 是电源频率,$ p $ 是电机的极对数。
2、转子速度
实际的转子转速($ n_r $)总是低于同步速度。这种速度差称为转差(slip)。
3、转差率
定义为转差与同步速度的比值:
$
s = \frac{n_s - n_r}{n_s}
$
二、变频驱动
异步电机节能的一个主要手段就是使用变频器驱动,通过调节电机的转速来适应不同的工况,达到节约能源的目的。
变频器的输出电压和电流中含有高次谐波,高次谐波不仅会引起负载损耗增加,破坏负载绝缘,而且会产生影响通讯的电磁干扰。
- 分布电容。分布电容是指电路元件之间或电路板上各个部分之间存在的电容。在实际电路上,由于导体 之间的几何形状和位置关系,会形成一定的电容。这种电容称为分布电容。分布电容通常是不可避免的,并且在高频电路设计中需要考虑。
- 寄生电容。寄生电容是指在设计电路时并不是有意引入的电容,但却存在于电路元件或电路布局中的电容。这种电容可能会对电路的性能产生负面影响,因为它可能导制会导致信号串优、干扰等问题。寄生电容的存在通常是由于电路元件之间的物理距离、布局、线路长度等因素引起的。
由于电源线路存在分布电容以及电机内部存在寄生电容,因此对应于功率开关器件的导通瞬间,将会产生正比于$C\dfrac{dv}{dt}$的脉冲电流序列,脉冲电流序列将导致变频器工况恶化,影响负载的运行性能,引起漏电流保护动作。
三、电机动的旋转方向
三相交流电按U-V-W(也称为A-B-C)相序变化,则产生的旋转磁场在空间上以顺时针方向旋转。若我们任意对调两相绕组的电流相序,如:U-V-W,则产生的旋转磁场以逆时针方向旋转。
四、电机的转差率
1、电动机同步转速
即为电动机的旋转磁场转速$n_s$,电机抽同步转速是一个定值,它与电动机的极对数P有关。
$$n_s=\dfrac{60\times f_1}{P}$$
其中$f_1$为电源频率,P为极对数。
| 极对数 | 极数 | 电源频率 | 同步转速 |
| 1 | 2 | 50 | 3000 |
| 2 | 4 | 50 | 1500 |
2、额定转差率
同步转速与转子实际转速n之差称为转速差,转速差与同步转速的百分比称为转差率,用符号S表示
$$S=\cfrac{n_s-n}{n}\times 100%$$
通常电机空载(空转)时,$s\le 0.5%$,额定负载时$s\le 5%$,大型电机s在0.5%~1%。
五、额定功率
$$P_N=P_{1N}\eta_{N}=\sqrt{3}U_N I_N \cos\phi_N \eta_n$$
其中,$P_{N}$称为电机额定运行时输出的机械功率,$P_{1N}$是电机额定运行时定子侧输入的电功率。
$U_N$是额定电压,即电机额定运行时定子绕组上的线电压。
$I_N$是额定电流,即电机额定运行时,定子绕组上的线电流。
$\cos\phi_N$,是额定功率因数。一般介于0.2~0.9之间,空载时(正序电流小于额定电流30%),通常小于0.2,半载时(正序电流大于额定电流50%),大约介于0.7~0.9
$\eta_n$,是额定效率。
电机效率的计算公式是:
$\eta = \dfrac{P_{out}}{P_{in}}\times 100%$
其中:
- $\eta $是效率(以百分比表示)
- $P_{out}$是电机的输出功率(机械功率),单位通常是W或kW
- $P_{in}$是电机的输入功率(电功率),单是W或kW
$P_{in}=V\times I\times PF\times \sqrt{3}$
对于三相交流电动机,其中:
- V是相电压
- I是电流
- PF是功率因数
- $\sqrt{3}$是三相系统的转换因子
输出功率可以通过测量电机轴上的扭矩和转速来计算:
$P_{out}=\dfrac{T\times \omega}{9.5488}$
其中:
- T是扭矩,单位是牛顿米(Nm)
- $\omega$是角速度,单位为每分钟转数(rpm)
- 常数9.5488用于将扭矩和转速的单位转换为功率的单位
1、一台三相四极异步电动机,P=28KW,Ue=380V,n=90%,COSΨ=0.88,定子为△形接法。在额定电压下,全压直接启动时启动电流为多少?试用Y-△启动时,问:启动电流多大?
电动机的额定电流Ie
Ie=Pe/UeCOSΨ=28000/【×380×0.88×0.9】=53.7A
电动机直接启动的启动电流I直接=6Ie=6×53.7=322.2A
电动机Y-△启动的启动电流IY-△=1/3×I直接=1/3×322.2=107.4A
2、三相电系统的不平衡度
三相电系统的不平衡度是指三相电流或电压中各相之间的差异程度。这种不平衡可能会导致电动机等设备的效率降低,并可能增加故障的风险。因此,对于电力系统的健康和效率来说,维持三相电流或电压的平衡是非常重要的。
不平衡度通常是通过计算不平衡电流与平均电流的比值来衡量的,表示为百分比。国际电工委员会(IEC)标准IEC 61000-3-13规定了三相电流不平衡度的限值。对于一般的电力系统,不平衡度应小于10%。对于敏感的设备或关键的应用,不平衡度的限制可能会更严格,有时可能需要小于5%。
六、三相异步电动机的转矩
理论上,三相异步电动机的转矩 T(牛顿·米,Nm)可以通过以下公式计算:
$$T=\dfrac{P_{out}}{\omega}$$
其中:
- T是转矩
- $P_{out}$是输出功率(瓦特,W)
- $\omega$是角速度 (弧度每秒)
角速度$\omega$与电机的转速n(rpm)之间的关系为
$$\omega=\dfrac{2\pi n}{60}$$
所以有:
$$T=\dfrac{\sqrt{3}U_N I_N \cos\phi_N \eta_n \times 60}{2\pi n}$$
因为I=U/R,所以转矩与电压的平方成正比。
1、为什么绕线式电动机转子串入适当电阻后能改善启动性能?
在绕线型异步电动机转子回路内接入适当的电阻,一方面使转子回路的电阻增加,从而使转子和定子的起动电流减少,起动转矩相应减小。另一方面由于转子回路电阻增加后,转子回路的功率因数增加使起动力矩相应增大。适当选择起动电阻数值,可使转子电路功率因数的增加大于转子电流的减少,而使起动转矩增大了。因此,在绕线型异步电动机的转子回路串入适当电阻,便能改善电动机的起动特性。
2、三相异步电机在启动瞬间,启动电流很大,启动转矩为什么不很大?
在启动瞬间,定子电流和磁场的建立需要一定的时间。这个过程称为电机的励磁过程。在这个过程中,磁场的建立速度较慢,导致启动时转矩不大。
七、三相异步电动机的磁通量
三相异步电动机的磁通量与电动机的设计和运行条件有关,通常不会直接计算磁通量,而是通过设计参数来确定。但是,如果需要估算磁通量,可以使用基于电动机基本原理的简化方法。
在三相异步电动机中,磁通量是由定子绕组产生的,它与电动机的输入电压、频率、绕组的电感以及电动机的构造有关。磁通量的大小可以从电动机的等效电路模型中得到一些信息。在理想情况下,忽略定子电阻和漏感的影响,磁通量$\Phi$ 可以使用以下公式估算
$$\Phi=\dfrac{V}{4.44\times f \times N \times K_{\omega}}$$
其中:
- V是每相电压(伏特),通常是定子绕组的相电压
- f是供电频率(Hz)
- N是每相绕组中的匝数
- $K_{\omega}$是绕组系数,它考虑了绕组的分布和跨步。
这个公式是基于变压器的原理,其中 $4.44$ 是正弦波电压和频率之间转换的系数。实际上,电动机的磁通量会受到电动机设计、负载条件、电源电压和频率波动等多种因素的影响。
1、气隙增大引起空载电流增大
-
磁路磁阻减小:
- 当气隙增大时,磁路中的有效磁路长度会增加,从而导致磁路的总磁阻减小。这会使得磁路中的磁通量增加,因为根据磁路的特性,磁通量与磁阻成反比关系。
-
磁通量增加:
- 随着磁路的磁阻减小,磁通量会增加。这会导致电机的感应电动势增大,从而引起空载电流的增加。
-
磁阻减小导致磁通量增加:
- 由于磁路磁阻减小,电机在空载状态下需要产生更多的磁通量来维持相同的感应电动势,因此空载电流会相应增大。
八、三相异步电动机的感应电动势
可以通过以下公式估算:
$$E=4.44\times f \times \Phi \times N \times K_{\omega}$$
其中:
- E是每相的感应电动势(伏)
- f是电源频率(Hz)
- $\Phi$是每极的磁通量(Wb)
- N是每相绕组的匝数
- $K_{\omega}$是绕组系数,它考虑绕组的分布和跨步。
要注意,这个公式给出的是理想情况下的电动势,实际上电机的绕组有电阻和漏感,还有铁损和其他损耗,因此实际的端电压会比这个计算的电动势小。
此外,K_{w}(绕组系数)是一个小于1的系数,用来修正非理想分布的绕组所带来的影响。对于具体的电机,这个系数需要根据电机的具体绕组方式来确定。
九、异步电动机的工作特性
异步电动机的工作特性主要是指在额定电压和额定频率下,转速、定子电流、功率因数与输出功率之间的关系。
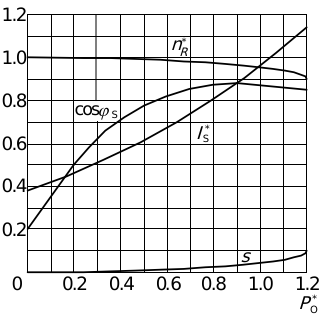
1、转速特性$n_R$
随着负载的增加,转速下降。
2、定子电流特性$I_S$
随着负载的增加,定子电流随之增加,故定子电流特性为一上升曲线。
3、功率因数特性$\cos_{\phi_S}$
异步电动机空载运行时,功率因数很低,通常小于0.2;随着负载的增加,功率因数逐渐上升,在额定负载附近,功率因数最高;如果进一步增加负载,功率因数将逐渐下降。
十、常用工具常识
1、信号继电器
为了确保信号继电器的正常工作和延长其使用寿命,通常建议在选择信号继电器时,工作电流不应超过额定电压下的 10% 到 20%。这样可以在保证可靠性的前提下,避免继电器因过载而出现问题
信号继电器线圈的工作电流在线圈上的电压降不应超过电源额定电压的10%
2、轴承代号
国标GB/T 272-93规定轴承代号由前置代号、后置代号、基本代号组成,基本代号是核心,前置与后置代号是补充。
3、滑动轴承的故障
磨损、胶合(烧瓦)、疲劳破坏
十一、异步三相电机常用的启动方式
1、直接启动
这是最简单和最常见的启动方式,电机直接连接到电源,启动时电机会承受较高的启动电流。
2、星三角启动(Y-三角启动)
- 在启动时,电机的定子绕组以星形连接,这时电机的线电压是较低的。这种连接方式可以减少启动时的电流峰值,减少对电网的冲击
- 在一定时间后(通常是几秒钟),电机会自动切换到三角形连接。在三角形连接下,电机的线电压会增加,电机可以达到额定运行状态。
3、自耦变压器启动
通过自耦变压器来限制启动电流,降低了电网对电机的冲击
4、软启动
使用电子器件来逐渐增加电机的电压和频率,从而减少启动时的电流冲击,延长电机和机械设备的寿命。
5、变频器启动
使用变频器控制电机的转速和扭矩,通过调整电压和频率来实现平稳启动和精确控制。
6、能耗制动启动
具体来说,能耗制动启动的过程如下:
- 启动阶段:
- 在启动时,电机作为发电机运行,机械负载驱动电机转子旋转,电机产生电能。
- 电能消耗或回馈:
- 产生的电能可以通过电阻器等装置进行消耗,将电能转化为热能。另一种方式是将电能回馈到电网中,以供其他设备使用。
- 电机达到额定运行状态:
- 通过这种方式,电机逐渐达到额定运行状态,实现了启动过程。